RETURN TO:
Home page - Performance Yacht Design 101
Rocker – the secret of high performance with control
In recent years particularly as designers new to boats operating at high Froude numbers have begun to draw more powerful boats, there have been problems associated with bow burying, poor helm control/balance and sometimes erratic behaviour. One way or other these often come down to the design of the aft and forward sections of the boat and their associated rocker.
The effect of rocker is often mis-understood and the forces/effects it imposes are instead associated on boats that have them, with some magical affect caused by chines. This is categorically not the case. Also overlooked in some twin rudder designs we’ve seen is in that bow sections/rocker have clearly not been designed in concert with stern sections/rocker where inappropriately large volumes at the bow have been allied with cut-away stern sections which produce a good deal of rocker at moderate and large angles of heel . To have optimal performance (particularly in moderate and strong winds) while still maintaining sufficient levels of control and handle-ability bow and stern sections and buttock lines must be designed as part of a whole, not in isolation.
The following paper was written as part of an explanation to a client’s project manager during the concept design stage for a new 77’ day racing design.
Note: The twin rudder hull shown is not the final hull design and is shown here only for illustration purposes. The two narrower waterline beam hull forms were developed for the purposes of performance comparison only.
In order to describe what rocker is and
some of the effects
of hulls with different rocker we developed three hulls. In terms of their hydrostatics they are described by the table below. All three hulls had the same max beam, same displacement but by changing their section shape one is able to change the performance characteristics of the different hulls.
Hull #1 is of moderate beam, with a chine which creates a ‘powerful’ hull with the highest form stability. Once can see from the table below that this hull provides 30% more righting moment than Hull#3. This comes at a cost in terms of wetted surface area at 0 angle of heel however, where Hull#1 has @10% more wetted surface than Hull #3. This isn’t the full story by any means however, because by careful design the heeled wetted surface area (at 24 degrees of heel) of Hull l#1 is only 1% more than Hull #3.
Hull #2 is a moderately powerful hull, with a narrower hull form forward compared to Hull #1 and correspondingly without fuller sections aft that are characterised by the appearance of a chine. One can see from the table below that it sits between Hulls #1 and #3 in terms of righting moment, wetted surface area, waterline beam etc.
Hull #3 is of a hull type typical to some IRC designers, narrow fairly vertical forward topsides which are flared aft to put hiking crew as far outboard as possible while maintaining a narrow waterline beam and low wetted surface area.
It’s little understood by most yachtsmen that while wetted surface area and waterline beam are an important player in terms of drag in light airs as slow speeds, as the yachts speed approaches its maximum upwind boat speed (up to this point the yacht is operating in displacement mode) the importance of viscous drag (which is proportional to wetted surface area) becomes far less. While total drag increases with speed, the % of this drag attributed to wetted surface area reduces rapidly. Once the yacht exceeds its upwind boat speed it enters a realm where it is said to be in semi-displacement or semi-planing mode where dynamic forces, displacement and hull form are of far greater importance. Until recently IOR, IMS and IRC designers have been designing boats that haven’t had the kind of performance that required huge study in this spectrum, while open class and multihull design is all about yachts and foils that operate at high Froude numbers. Yacht’s that are just about always operating in semi and full planing mode.
|
OCD 77 Rocker comparison hydrostatics
|
Hull#1
|
Hull #2
|
Hull #3
|
|
|
|
|
|
|
|
Heel at 0 degrees
|
|
|
|
|
|
Displacement
|
tonne
|
23.73
|
23.73
|
23.73
|
|
LWL
|
m
|
23.32
|
22.92
|
23.01
|
|
BWL
|
m
|
4.64
|
4.164
|
3.65
|
|
Max canoe body draft at keel
|
m
|
0.595
|
0.656
|
0.675
|
|
Waterplane area
|
m2
|
67.99
|
61.84
|
58.00
|
|
Wetted surface area
|
m2
|
88.85
|
83.74
|
81.36
|
|
Cp (prismatic coefficient)
|
|
0.45
|
0.45
|
0.46
|
|
Cm (midship area coeff)
|
|
0.13
|
0.14
|
0.16
|
|
|
|
|
|
|
|
Heel at 24 degrees
|
|
|
|
|
|
LWL
|
m
|
23.48
|
23.48
|
23.46
|
|
BWL
|
m
|
3.61
|
3.63
|
3.57
|
|
Wetted surface area
|
m2
|
81.48
|
80.15
|
80.67
|
|
GZ
|
m
|
1.31
|
1.10
|
0.93
|
|
RM righting moment
|
tonne.m
|
31.06
|
26.10
|
21.95
|
|
Delta RM
|
%
|
0
|
84.0
|
70.7
|
So, while the above static numbers are interesting, Figure 1 illustrates what the shape of center line of the three yachts looks like viewed from the side.
Hull #1 is red
Hull #2 is blue
Hull #3 is green
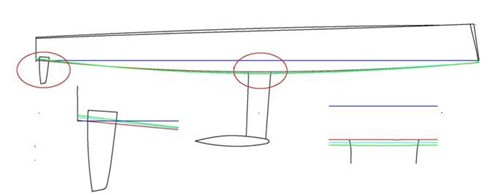
Figure 1
These lines show the rocker (the curve of the yacht longitudinally) on the centreline at 0 angle of heel. To make it clearer what’s happening at the middle and stern of the yacht there are two inserts at a higher scale.
Mid-ships around the keel one can see that the trade off in the green hull to having a narrower waterline beam is to have a deeper canoe body. Such that, for the same overall maximum draft the narrower yacht would appear to have a shorter, less efficient keel fin.
However, what we’re more interested in is the affect at the stern (which is highlighted in the sketch of page 3) where the angle of Hull #1 to the waterline is less than Hull #2 and Hull #3.
The two sets of sections illustrated in Figure 2 make it clearer the difference in the hull shapes drawn for the three yachts which result in the figures shown in the table of hydrostatic values. While in profile view it’s not all clear that there is any great difference in the hulls, in section view this is made much more apparent. One can see for instance that if it were not for the introduction of a ‘virtual vertical cutting place’ through Hull #1 that the beam of the yacht would be far greater than the other two hulls. This shows clearly another mis-conception that the chine is somehow an important hull device with magical properties. This is hardly the case; the chine is in fact a result of a decision to terminate the beam of what would be an otherwise very wide hull prematurely. It is the general characteristics of the hull form that are the most important aspect not the fact that there is a chine, although by scrutinising the line of the chine one can discern and make assumptions about some of those hull characteristics.
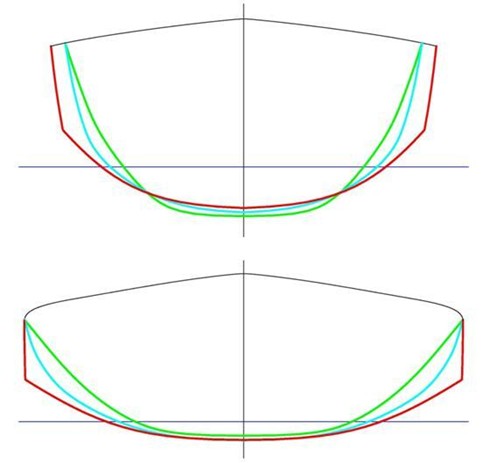
Figure 2
Figure 3 illustrates the three different sets of hull lines as they approach the transom. In simple terms one can imagine that as water flows along parallel to the hull that it exits in the direction of the three arrows and that the total drag force is represented by F1, F2 and F3. Note that these forces are not parallel with the waterline and so it follows that there must be a vertical component of force acting downward pulling the stern of the yacht down into the water. Since the angle of F3 is greater to the waterline than F1, the vertical force associated with F1 is greater than F3. In other words, for the same value of drag the stern of the narrower yacht is being forced down more than that of the wider yacht. This is only one area where static values (such as in the table) are over-shadowed by what happens once the yacht is in motion, particularly at speeds approaching and exceeding hull speed.
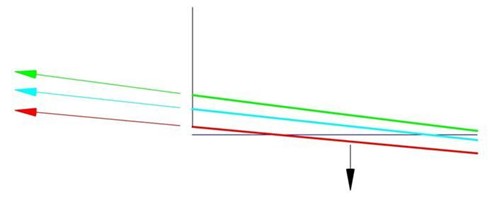
Figure 3
Figure 4 illustrates the effect of the couple created by F
down
at the stern and the corresponding F
up
at the bow. The two forces create what is known as a ‘couple’ about the center of mass/center of buoyancy of the yacht. The greater the value of F
down
the more sail force and longer it takes for the yacht to escape it’s own stern wave, rise over it’s bow wave and begin to operate in semi-planing mode where the yacht’s displacement is effectively reduced by the overall lift created by the pressure differences over the underwater body of the yacht . Once in semi-planing/semi-displacement mode as the yacht increases speed the values of F
down
and F
up
increase. Again, in simple terms, if the yacht is not correctly designed for high speed/Froude number planing what happens is that the bow rises prematurely and waterline length decreases.

Figure 4
While the bow rising looks cool and is important at some point, particularly at very high speeds and in waves, it is not quick. It’s not rocket science to comprehend that a 77’ yacht displacing 28000kg is faster than a 70’ yacht displacing 28,000 kg.
OCD’s twin rudder moderate beam low rocker hulls are designed to allow a yacht of relatively light displacement to exit displacement mode earlier, begin semi and full planing earlier while maintaining maximum waterline length with minimum drag in the process. The trade off is higher drag at low speeds, but as you will recall this is mitigated to a great extent once the yacht begins to heel by careful hull design.
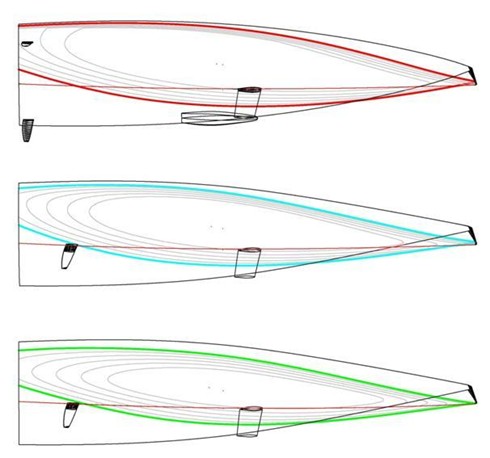
Figure 5
Figure 5 illustrates another factor with respect to heel, which of course a yacht spends a good deal of its time doing. Illustrated here are the three hulls at twenty four degrees of heel with the resultant static waterlines shown in their three respective colours. This is a slightly simplified situation since as we’ve described the stern is more greatly immersed underway than it is when theoretically static. However, this is a useful graphic since in the real world there are also waves passing down the hull. The centreline of the yacht in each case is in red and one can see clearly that for a yacht of this beam it would not be possible to have a single rudder at the stern. Hence the reason why single rudders are generally pushed further forward on the hull even though this reduced their effectiveness for a given area when turning or balancing the yacht.
What can be seen is how well immersed the smaller twin rudder is and also how it is also almost vertical in the water thereby creating side forces that are more or less parallel to the waterline. On the other hand there is a distinct angle to the single rudder blade and this is not so much important in terms of the loss of effectiveness of the rudder itself and increased drag with heel. More importantly and rarely understood is that as weather helm is applied to bare the yacht’s bow away, because of the angle of the single rudder to the waterline, a proportion of the rudder forces are driving the bow deeper in the water, increasing the forces causing the weather helm in the first place and so a self perpetual negative cycle is in train. This remains a little understood and considerable advantage both in terms of drag and safety/dynamic stability for twin rudder yachts.
Finally page 6, since yachts spend a good deal of their time heeled we don’t design them thinking of them sat at 0 degrees of heel and designers use so called buttock lines to look at what the hull looks like when heeled.

Figure 6
If one imagines a saw blade parallel to the centreline of the yacht and offset say 1.5m outboard. Then, pass the saw blade vertically down through the deck and hull of the yacht one will have cut the boat in two. When viewed from the side you would see a hole in the side of the yacht and the edge of the shape of this hole would be the buttock line at 1.5m.
This is what is illustrated by six coloured lines in Figure 6. In each case they show the 1.5m and 2.5m buttock lines for hulls #1, #2 and #3. The importance of these when were we to zoom in would be that one can see that the angles of the buttocks (effectively the heeled rocker lines) are equivalent to those that we see in Figure 3, in that the lines with the least rocker and so least dynamic drag are for Hull #1.
For more information on the OC 77 described in this article go to:
OCD 77 High Performance Day Sailer
For more information regarding OC's design process go to:
Naval Architecture
RETURN TO:
Home page - Performance Yacht Design 101
To receive postings of future articles find and LIKE us at:
